| Home > Reviews > Manta Parallel Robot: A 4 DOF Robot for Inexpensive Material Handling | |
Manta Parallel Robot: A 4 DOF Robot for Inexpensive Material Handling |
|
|
It is in the middle 90's, in the footsteps of the Delta robot success, Mr. Clavel asked Mr. Rolland to investigate new parallel robot designs in order to achieve displacements with three translations and one or two useful rotations. The designs had to be applicable to industry as low-cost material handling manipulators. The specification criteria were very high throughput and simple construction. If possible, the design had to find innovative means to increase workspace, somewhat limited in parallel manipulators. Mr. Rolland came up with the idea to focus on one rotation at first, thus on 4 DOF manipulators, and proposed the Manta architecture. This robot is 4 DOF quadrapod also using the parallel-bar principle in order to eliminate rotations.
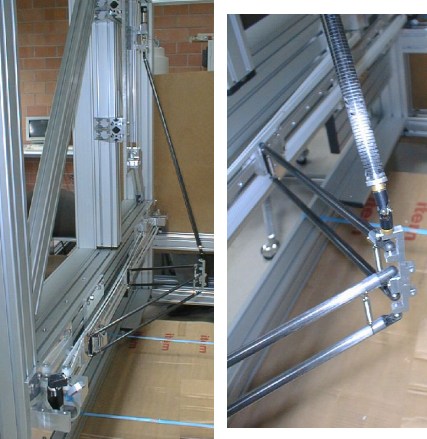
The DesignThe Manta manipulator features three main kinematics chains. It allows displacements along three translations and one rotation which is the sideway tilting of the mobile platfiorm. The basic idea behind the Manta robot design is not far from that behind the Delta robot design since it is again making use of parallelograms. A single parallelogram chain cannot restrain any rotation but the conjunction of two chains allows to block two rotations, of which one is along the end-effector axis that is perpendicular to the mobile platform. Each parallel bar is maintained together by two stiff springs. The third kinematics chain is made of one single bar along which platform rotation is transmitted. In order to increase workspace, the manipulator structure is making use of linear axes which include the actuators and sensors. They can either be in a parallel or perpendicular layout. But any other linear actuator layout can also lead to significant configurations. These actuators can be linear motors, linear motion guides, etc. The parallel axis layout brings the unlimited workspace potential which can be used in warehouses, for example. The main linear actuator disadvantage is acceleration which is somewhat limited by technology since the commercially available axes are limited to 5 G. The use of three base-mounted actuators and low-mass links allows the mobile platform to achieve accelerations of up to 5 G in experimental environments. These figures could be better if stiffer structures were built or linear motors used. The mobile platform has been built with passive paltform joints which are very concentrated in order to keep the structure as stiff as possible by respecting the triangular transeversal configuration made by the facing parallel bars. This makes the Manta robot a perfect candidate for high-throughput pick and place operations for such applications as media (CD, DVD, cassette) changer in a mediatheque, material handling in heavy payload conditions and wharehousing. The use of base-mounted actuators and low-mass links allows the mobile platform to achieve accelerations of up to 5 G's in experimental environments. This could be further improved if stiffer structures are built or linear motors are used. The mobile platform has been built with passive paltform joints, concentrated in order to keep the structure as stiff as possible by respecting the triangular transeversal configuration made by the facing parallel bars. Inasmuch, the mobile platform has to have the two single bars to be located as far apart as possible so that smaller forces may be used to maintain platform position. The performance of the Kanuk robot makes it a perfect candidate for high-throughput pick and place operations for applications such as media (CD, DVD, cassette) changer, material handling in heavy payload conditions and wharehouse operations. The First PrototypeA prototype of the Manta robot has been constructed at EPFL.
Bibliography
Related Links
|
|
Home |
Bibliography |
Patents |
Terminology |
Reviews |
Software |
Who's Who |
News Site Map | Site Search | Contact Us | About Us |
| Copyright © 2000– by Ilian Bonev | Published on: April 5, 2002 |